中文标题:高效精准的时序聚类算法K-Shape
英文标题:k-Shape: Efficient and Accurate Clustering of Time Series
发布平台:ACM SIGMOD
Proceedings of the 2015 ACM SIGMOD International Conference on Management of Data
发布日期:2015-05-27
引用量(非实时):703
DOI:10.1145/2723372.2737793
作者:John Paparrizos, Luis Gravano
文章类型:conferencePaper
品读时间:2022-01-19 17:23
1 文章萃取
1.1 核心观点
本文提出了一种领域独立、高精度、高效的时间序列聚类算法h-Shape。k-Shape以k-means算法为基础,根据时间序列的特殊性,设计了互相关的距离度量算法,以及将质心的寻找转为最优化问题,实现了对时间序列形状的考量,并通过大量数据和算法对比,验证了算法的鲁棒性、准确性和低计算成本。
1.2 综合评价
- 针对时序聚类做特定优化,包含对时间序列形状的解释性
- 设计了互相关的距离度量算法,并通过快速傅里叶变换加速运算
- 将质心的寻找转为(Rayleigh Quotient)瑞利商问题,实现最优化问题的快速计算
- 最终效果优秀,相比其他算法计算复杂度低两个数量级
1.3 主观评分:⭐⭐⭐⭐⭐
2 精读笔记
2.1 背景知识
时序聚类算法依赖于传统聚类算法,但需要更多适应性的调整,其中最常见的是对距离测度的创新
本文提出的K-Shape算法就是采纳了K-means聚类的思想,不过对于距离度量和质心计算进行了革新,并通过广泛实验进行了验证。
聚类追求的是:簇内样本尽可能相似(同质性最大,homogeneity),簇间样本尽可能不相似(差异性最大,separation),常见的设定目标为距离平方和最小
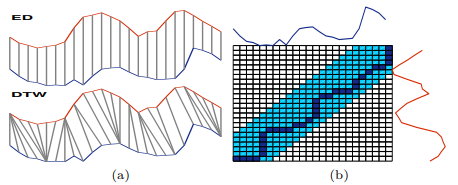
时序数据寻找质心的过程是一个典型的Steiner’s sequence问题,最终的质心应当满足距离簇内所有样本的距离平方和最小。而对于两段时序,衡量距离的常见方法为欧氏距离(Euclidean Distance,即ED)和动态时间规整(Dynamic Time Warping,即DTW):
描述时间序列相似度的几种不变性:缩放平移不变性(Scaling and translation invariances)、平移不变性(Shift invariance,可用于局部相似或存在相位差的情况)、均匀缩放不变性(Uniform scaling invariance,常用于时序对齐,比如均匀拉伸短序列或均匀压缩长序列)、闭塞不变性(Occlusion invariance,忽略局部或缺失的子序列)、复杂不变性(Complexity invariance,常用于形状相似但是细节丰富度不同的两个序列)
文中提供的距离测度方法具备伸缩平移不变性
2.2 K-Shape算法介绍
2.2.1 距离测度方法SBD
由于DTW高昂的计算成本,本文主要采用了互相关(Cross Correlation)作为基本的距离测度方法,并通过一系列的优化在一定程度上解决了互相关的性能缺陷。
假设存在两个长度一致的时序,分别为$\vec{x}=(x_1,...,x_m)$和$\vec{y}=(y_1,...,y_m)$
这里之所以设定长度一致,主要是为了简化后续的公式,理解公式后,就发现可以很容易地应用到长度不一致的情况
互相关主要通过在$\vec{y}$上滑动$\vec{x}$并依次进行点乘加和而得(类似于卷积操作)
为了方便处理边缘情况,定义滑动时的$\vec{x}$如下(补零操作):
$$\begin{equation} \vec{x}_{(s)} = \left\{ \begin{array}{rl} (0_1,...,0_{|s|},x_1,x_2,...,x_{m-s}) & \mbox{if } s \geq 0, \\ (x_{1-s},...,x_{m-1},x_m,0_1,...,0_{|s|}) & \mbox{if } s < 0, \end{array} \right. \end{equation}$$
- 其中$s\in[-m,m]$,$s\geq 0$对应滑动刚开始时,$\vec{x}$左侧溢出的情况;
- $s<0$对应滑动快结束时,$\vec{x}$右侧溢出的情况。
- 最终计算的互相关序列长度为$(2m-1)$,其中第$\omega$个互相关值为$CC_{\omega}$:
$$CC_{\omega}(\vec{x},\vec{y})=R_{\omega-m}(\vec{x},\vec{y})$$ 其中$\omega \in{1,2,...,2m-1}$,而$R_{\omega-m}(\vec{x},\vec{y})$计算方式如下: $$ \begin{equation} R_{k}(\vec{x},\vec{y}) = \left\{ \begin{array}{rl} \Sigma_{l=1}^{m-k}x_{l+k}\cdot y_l& \mbox{if } k \geq 0, \\ R_{-k}(\vec{x},\vec{y}) & \mbox{if } k < 0, \end{array} \right. \end{equation} $$ 其中$k<0$对应$\omega <m$的时候,即$\vec{x}$左溢出的情况,此时的计算转化为$R_{-k}=\Sigma_{l=1}^{m+k}x_{l-k}\times y_l$,也就是向量$(x_{1+|k|},x_{2+|k|},...,x_m)$与向量$(y_1,y_2,...,y_{m-|k|})$的点积和
这里的逻辑看起来复杂,其实就是滑动点乘,只不过将边缘情况考虑进去,而针对边缘情况的补零操作其实也就意味着不计算溢出部分
对互相关结果进行标准化的三种方法 $$ \begin{equation} NCC_{q}(\vec{x},\vec{y}) = \left\{ \begin{array}{rl} \frac{CC_{w}(\vec{x},\vec{y})}{m} & q =b \ (NCC_b), \\ \frac{CC_{w}(\vec{x},\vec{y})}{m-|w|} & q =u \ (NCC_u) \\ \frac{CC_{w}(\vec{x},\vec{y})}{\sqrt{R_0(\vec{x},\vec{x})R_0(\vec{y},\vec{y})}} & q =c \ (NCC_c), \end{array} \right. \end{equation} $$ 前两种标准化方法主要为了消除长度的影响,而第三种方法主要为了消除自相关的应该
以真实数据验证,数据长度均为$1024$,$\omega \in{1,2,...,2048-1}$,则三种方式的结果如下:
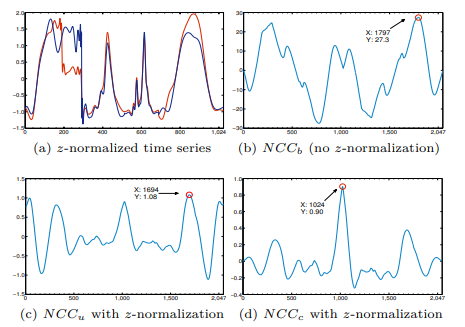
图中红圈对应了匹配度(标准化互相关)最高的时候,也是描述序列间距离的最佳位置
其中子图(d)即表示的本文所采用的标准化方法,对于两侧由于时序长度较短时的异常波动起到了很好的抑制作用,最高点对应的$\omega=m=1024$,也符合直觉判断
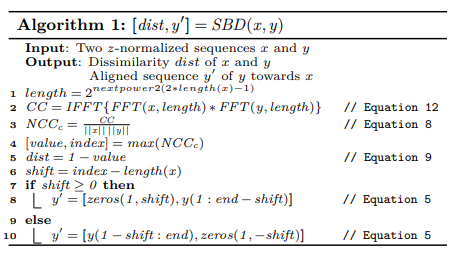
而本文的距离(Shape-based distance,简称SBD)计算公式则是根据标准化互相关的简单变形: $$SBD(\vec{x},\vec{y})=1-max_{\omega}(\frac{CC_{w}(\vec{x},\vec{y})}{\sqrt{R_0(\vec{x},\vec{x})R_0(\vec{y},\vec{y})}})$$ 值得一提的是,借助快速傅里叶变换(FFT)可以将距离计算的复杂度从$O(n^2)$降到$O(nlgn)$
具体算法流程如下:
2.2.2 质心计算
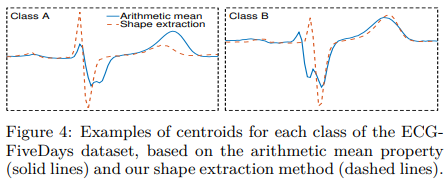
传统聚类算法,如K-means都是采用簇内均值作为质心的计算方式,但是这种方式对于时序数据来说,不能够把握住时序的特征,均值方法(实线)与本文方法(虚线)对比如下:
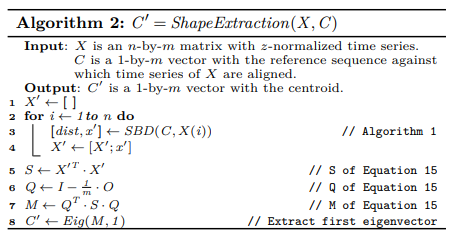
本文方法是建立最优化问题,寻找与第$k$个簇内与所有时序互相关值和最小的时序$\vec{u}_k^{\ast}$:
$$\vec{u}_k^{\ast}=argmax_{\vec{u}_k}\Sigma_{\vec{x_i}\in P_k}(\frac{max_w CC_w(\vec{x_i},\vec{u_k})}{\sqrt{R_0(\vec{x_i},\vec{x_i})\cdot R_0(\vec{u_k},\vec{u_k})}})$$
由于均值方法得到的质心与本文方法得到的质心较为相似,所以考虑采用均值法质心用于时序对齐,计算得到合理的$\omega$,然后省略上公式的部分,可将$\vec{u_k^{\ast}}$的公式更新如下: $$\vec{u}_k^{\ast}=argmax_{\vec{u}_k}\Sigma_{\vec{x_i}\in P_k}(\Sigma_{l\in {[1,m]}}x_{il}\cdot \mu_{kl})^2$$ 公式的向量化表示结果如下: $$\vec{u}_k^{\ast}=argmax_{\vec{u}_k}\Sigma_{\vec{x_i}\in P_k}(\vec{x_i^T}\cdot \vec{u_k})^2=argmax_{\vec{u}_k}\vec{u_k^T}\cdot \Sigma_{\vec{x_i}\in P_k}(\vec{x_i}\cdot \vec{x_i^T} )\vec{u_k}$$ 令$\vec{u}_k=\vec{u}_k\cdot Q$使其中心化,其中$Q=I-\frac{1}{m}O$,$I$是单位矩阵,$O$是全1矩阵
令$S=\Sigma_{\vec{x_i}\in P_k}(\vec{x_i}\cdot \vec{x_i^T} )$简化公式,最后除以$\vec{u}k^T\cdot \vec{u}_k$对$\vec{u}_k$进行归一化,最终公式如下: $$\vec{u}_k^{\ast}=argmax\{\vec{u}_k}\frac{\vec{u}_k^T\cdot Q^T\cdot S \cdot Q \cdot \vec{u}_k}{\vec{u}_k^T\cdot \vec{u}_k}=argmax_{\vec{u}_k}\frac{\vec{u}_k^T\cdot M \cdot \vec{u}_k}{\vec{u}_k^T\cdot \vec{u}_k}$$
最终公式转换为了一个(Rayleigh Quotient)瑞利熵问题,其最大特征值即对应了最优化问题的最大值,最大特征值对应的特征向量对应了本文所需的质心$\vec{u}_k^{\ast}$
具体算法流程如下:
2.2.3 K-shape时序聚类
K-shape聚类方法与K-means方法很像,只不过距离计算方法改为了SBD,质心计算方法也进行了相应调整,具体算法流程如下:

简单来说,就是在迭代中根据SBD将每个时序分配给最相似的簇,然后更新簇的质心,进入下一次迭代,直到最终簇的分布不再变化或者达到最大迭代次数(100)
算法复杂度分析:$n$表示序列个数,$m$表示序列长度,$k$表示簇/类别的个数
- 计算SBD距离并分配每个时序给相应簇,其中计算SBD距离的复杂度为$O(mlogm)$,距离计算会重复$n\cdot k$次,所以此过程最终计算复杂度为$O(n\cdot k \cdot m \cdot log(m))$
- 计算矩阵$M$的复杂度为$O(n\cdot m^2)$,求解矩阵$M$的特征矩阵的复杂度为$O(k\cdot m^3)$
- 最终K-shape算法的计算复杂度为$O(max{n\cdot k \cdot m \cdot log(m), n\cdot m^2, k\cdot m^3})$
2.3 实验评估
最终评估使用48个带标签数据集,不同数据集的序列个数从56到9000+不等,不同数据集的序列长度从24到1882不等,不过同一个数据集的序列长度相同
最终不同距离度量方法的对比如下:

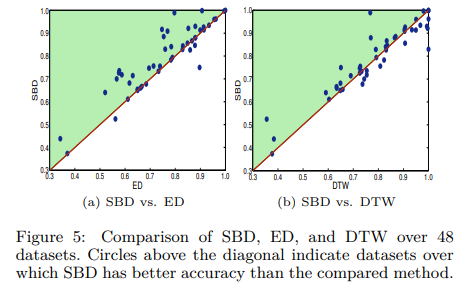
初步结论:
- cDTW比DTW更快,精度更高
- SBD比DTW更快,略低于ED
- SBD fft+复杂度 权衡准确性和效率来说结果最好
不同聚类方法对比:
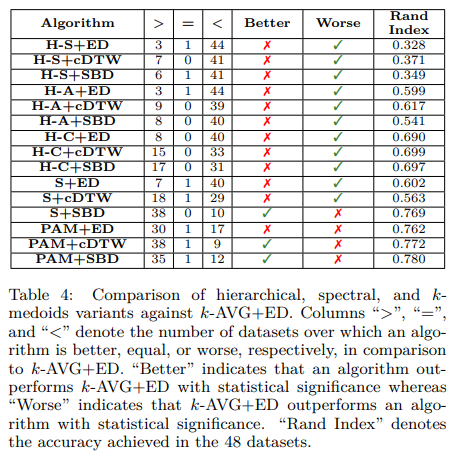
其中H表示层次聚类(H-S、H-A、H-C分别表示层次聚类的三种簇间距计算方式,Single Linkage 最近值,Complete Linkage最远值,Average Linkage平均值),S表示谱聚类,PAM表示Partitioning Around Medoi
相关资源
- 论文地址
- 论文源码
- 集成相关算法的工具:stlearn
- 本地文件地址:2015_k-Shape_Paparrizos_Gravano.pdf
- 本地Zotero地址:2015_k-Shape_Paparrizos_Gravano.pdf