AlpacaEval:主流大语言模型评测
AlpacaEval是一种由斯坦福大小推出的LLM自动评估工具
- 其特点是快速、廉价且可靠
- AlpacaEval 与真实人类注释的一致性很高
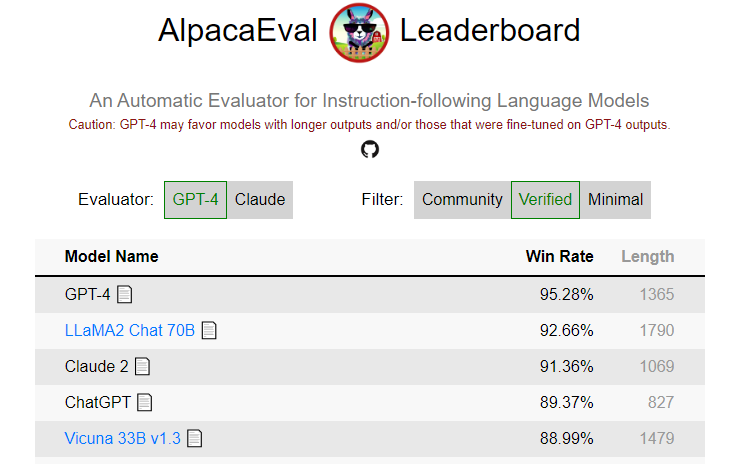
- 2023-09-20 Xwin-LM在 AlpacaEval 上基准测试
AlpacaEval是一种由斯坦福大小推出的LLM自动评估工具
情感分析(sentiment analysis):研究人们在文本中 (如产品评论、博客评论和论坛讨论等)“隐藏”的情绪
常见应用领域
情感分析采用的示例数据集是电影评价数据集
基于PyTorch的情感分析数据读取与预处理:
import os
import torch
fr本试题内容摘自2016年在 学堂在线 报名的课程《财务分析与决策》,内容可能存在过时
本文内容请勿用于商业用途,对课程有付费意愿的同学可报名最新课程内容
(60/60 分数)
1、 下列项目中,引起负债有增有减的经济业务是:
2